
Rede Neural: Arquitetura, Componentes e Principais Algoritmos
Publicados: 2020-05-06As Redes Neurais Artificiais (RNAs) são parte integrante do processo de Deep Learning. Eles são inspirados na estrutura neurológica do cérebro humano. De acordo com AILabPage , as RNAs são “códigos de computador complexos escritos com o número de elementos de processamento simples e altamente interconectados, inspirados na estrutura biológica do cérebro humano para simular modelos de trabalho e processamento de dados (informações) do cérebro humano”.
Junte -se às melhores certificações de aprendizado de máquina on-line das principais universidades do mundo - mestrados, programas de pós-graduação executiva e programa de certificação avançada em ML e IA para acelerar sua carreira.
O Deep Learning se concentra em cinco redes neurais principais, incluindo:
- Perceptron de várias camadas
- Rede de base radial
- Redes Neurais Recorrentes
- Redes Adversárias Geradoras
- Redes Neurais Convolucionais.
Índice
Rede Neural: Arquitetura
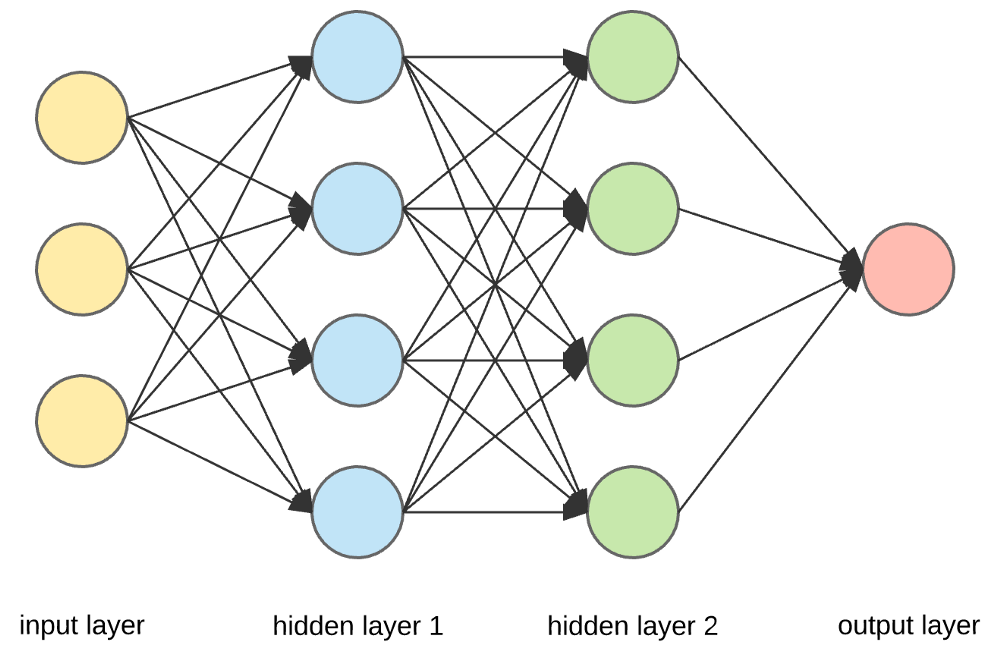
Redes neurais são estruturas complexas feitas de neurônios artificiais que podem receber múltiplas entradas para produzir uma única saída. Este é o principal trabalho de uma Rede Neural – transformar a entrada em uma saída significativa. Normalmente, uma Rede Neural consiste em uma camada de entrada e saída com uma ou várias camadas ocultas.
Em uma Rede Neural, todos os neurônios influenciam uns aos outros e, portanto, estão todos conectados. A rede pode reconhecer e observar todos os aspectos do conjunto de dados em mãos e como as diferentes partes dos dados podem ou não se relacionar entre si. É assim que as Redes Neurais são capazes de encontrar padrões extremamente complexos em grandes volumes de dados.
Leia: Aprendizado de máquina versus redes neurais

Em uma Rede Neural, o fluxo de informações ocorre de duas maneiras –
- Redes Feedforward: Neste modelo, os sinais viajam apenas em uma direção, em direção à camada de saída. As redes feedforward têm uma camada de entrada e uma única camada de saída com zero ou várias camadas ocultas. Eles são amplamente utilizados no reconhecimento de padrões.
- Redes de Feedback: Neste modelo, as redes recorrentes ou interativas utilizam seu estado interno (memória) para processar a sequência de entradas. Neles, os sinais podem trafegar em ambas as direções através dos loops (camadas ocultas) na rede. Eles são normalmente usados em séries temporais e tarefas sequenciais.
Rede Neural: Componentes
Fonte
Camadas de entrada, neurônios e pesos -
Na imagem acima, a camada amarela mais externa é a camada de entrada. Um neurônio é a unidade básica de uma rede neural. Eles recebem entrada de uma fonte externa ou de outros nós. Cada nó está conectado com outro nó da próxima camada, e cada uma dessas conexões tem um peso específico. Os pesos são atribuídos a um neurônio com base em sua importância relativa em relação a outras entradas.
Quando todos os valores de nós da camada amarela são multiplicados (junto com seu peso) e resumidos, gera-se um valor para a primeira camada oculta. Com base no valor resumido, a camada azul possui uma função de “ativação” pré-definida que determina se este nó será ou não “ativado” e quão “ativo” ele será.
Vamos entender isso usando uma tarefa simples do dia a dia – fazer chá. No processo de fabricação do chá, os ingredientes usados para fazer o chá (água, folhas de chá, leite, açúcar e especiarias) são os “neurônios”, pois são os pontos de partida do processo. A quantidade de cada ingrediente representa o “peso”. Depois de colocar as folhas de chá na água e adicionar o açúcar, as especiarias e o leite na panela, todos os ingredientes se misturam e se transformam em outro estado. Este processo de transformação representa a “função de ativação”.
Saiba mais sobre: Deep Learning vs Redes Neurais
Camadas ocultas e camada de saída -
A camada ou camadas ocultas entre a camada de entrada e saída é conhecida como camada oculta. É chamada de camada oculta, pois está sempre oculta do mundo externo. A computação principal de uma Rede Neural ocorre nas camadas ocultas. Assim, a camada oculta recebe todas as entradas da camada de entrada e realiza o cálculo necessário para gerar um resultado. Este resultado é então encaminhado para a camada de saída para que o usuário possa visualizar o resultado da computação.
Em nosso exemplo de chá, quando misturamos todos os ingredientes, a formulação muda de estado e cor ao ser aquecida. Os ingredientes representam as camadas ocultas. Aqui o aquecimento representa o processo de ativação que finalmente entrega o resultado – chá.
Rede Neural: Algoritmos
Em uma Rede Neural, o processo de aprendizado (ou treinamento) é iniciado dividindo os dados em três conjuntos diferentes:
- Conjunto de dados de treinamento – Este conjunto de dados permite que a Rede Neural entenda os pesos entre os nós.
- Conjunto de dados de validação – Este conjunto de dados é usado para ajustar o desempenho da Rede Neural.
- Conjunto de dados de teste – Este conjunto de dados é usado para determinar a precisão e a margem de erro da Rede Neural.
Uma vez que os dados são segmentados nessas três partes, os algoritmos de Rede Neural são aplicados a eles para treinar a Rede Neural. O procedimento utilizado para facilitar o processo de treinamento em uma Rede Neural é conhecido como otimização, e o algoritmo utilizado é chamado de otimizador. Existem diferentes tipos de algoritmos de otimização, cada um com suas características e aspectos exclusivos, como requisitos de memória, precisão numérica e velocidade de processamento.
Antes de mergulharmos na discussão dos diferentes algoritmos de Rede Neural , vamos entender primeiro o problema de aprendizado.
Leia também : Aplicações de rede neural no mundo real
O que é o Problema de Aprendizagem?
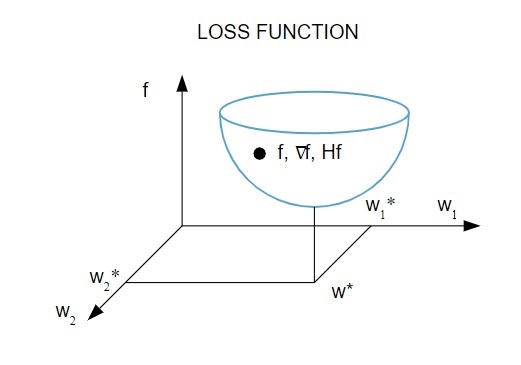
Representamos o problema de aprendizagem em termos da minimização de um índice de perda ( f ). Aqui, “ f ” é a função que mede o desempenho de uma Rede Neural em um determinado conjunto de dados. Geralmente, o índice de perda consiste em um termo de erro e um termo de regularização. Enquanto o termo de erro avalia como uma Rede Neural se ajusta a um conjunto de dados, o termo de regularização ajuda a evitar o problema de overfitting, controlando a complexidade efetiva da Rede Neural.
A função de perda [ f(w ] depende dos parâmetros adaptativos – pesos e bias – da Rede Neural, que podem ser agrupados em um único vetor de peso n-dimensional ( w ).
Aqui está uma representação pictórica da função de perda:
Fonte
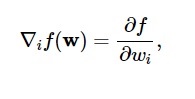
De acordo com este diagrama, o mínimo da função de perda ocorre no ponto ( w* ). A qualquer momento, você pode calcular a primeira e a segunda derivada da função de perda. As primeiras derivadas são agrupadas no vetor gradiente e seus componentes são representados como:
Fonte
Aqui, i = 1,…..,n .
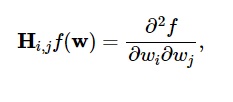
As segundas derivadas da função de perda são agrupadas na matriz Hessiana , assim:
Fonte
Aqui, i,j = 0,1,…
Agora que sabemos qual é o problema de aprendizagem, podemos discutir os cinco principais
Algoritmos de rede neural .
1. Otimização unidimensional
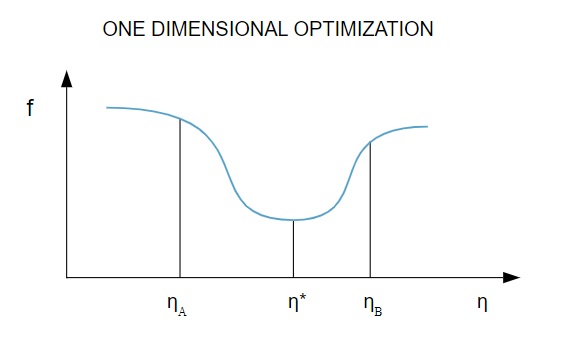
Como a função de perda depende de vários parâmetros, os métodos de otimização unidimensional são fundamentais no treinamento de redes neurais. Os algoritmos de treinamento primeiro calculam uma direção de treinamento ( d ) e então calculam a taxa de treinamento ( η ) que ajuda a minimizar a perda na direção de treinamento [ f(η) ].
Fonte
No diagrama, os pontos η1 e η2 definem o intervalo que contém o mínimo de f, η* .
Assim, os métodos de otimização unidimensional visam encontrar o mínimo de uma determinada função unidimensional. Dois dos algoritmos unidimensionais mais usados são o Método da Seção Dourada e o Método de Brent.
Método da Seção Dourada
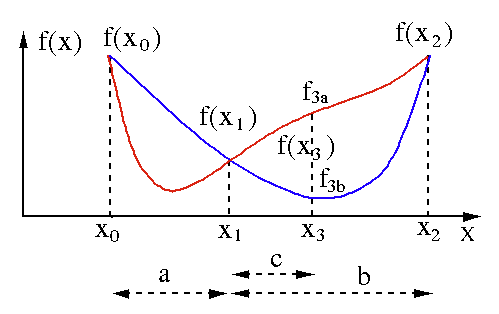
O algoritmo de busca da seção áurea é usado para encontrar o mínimo ou o máximo de uma função de variável única [ f(x) ]. Se já sabemos que uma função tem um mínimo entre dois pontos, podemos realizar uma busca iterativa como faríamos na busca por bissecção pela raiz de uma equação f(x) = 0 . Além disso, se pudermos encontrar três pontos ( x0 < x1 < x2 ) correspondentes a f(x0) > f(x1) > f(X2) na vizinhança do mínimo, então podemos deduzir que existe um mínimo entre x0 e x2 . Para descobrir esse mínimo, podemos considerar outro ponto x3 entre x1 e x2 , que nos dará os seguintes resultados:
- Se f(x3) = f3a > f(x1), o mínimo está dentro do intervalo x3 – x0 = a + c que está relacionado com três novos pontos x0 < x1 < x3 (aqui x2 é substituído por x3 ).
- Se f(x3) = f3b > f(x1 ), o mínimo está dentro do intervalo x2 – x1 = b relacionado com três novos pontos x1 < x3 < x2 (aqui x0 é substituído por x1 ).

Fonte
Método de Brent
O método de Brent é um algoritmo de descoberta de raízes que combina a interpolação quadrática entre colchetes , bisseção , secante e inversa . Embora este algoritmo tente usar o método secante de convergência rápida ou interpolação quadrática inversa sempre que possível, ele geralmente reverte para o método da bissecção. Implementado na Wolfram Language , o método de Brent é expresso como:
Método -> Brent em FindRoot [eqn, x, x0, x1].
No método de Brent, usamos um polinômio interpolador de Lagrange de grau 2. Em 1973, Brent afirmou que esse método sempre convergirá, desde que os valores da função sejam computáveis dentro de uma região específica, incluindo uma raiz. Se houver três pontos x1, x2 e x3 , o método de Brent ajusta x como uma função quadrática de y , usando a fórmula de interpolação:

Fonte
As estimativas de raiz subsequentes são alcançadas considerando, produzindo assim a seguinte equação:
![]()
Fonte
Aqui, P = S [ T(R – T) (x3 – x2) – (1 – R) (x2 -x1) ] e Q = (T – 1) (R – 1) (S – 1) e,

Fonte
2. Otimização multidimensional
A esta altura, já sabemos que o problema de aprendizado para Redes Neurais visa encontrar o vetor de parâmetros ( w* ) para o qual a função de perda ( f ) assume um valor mínimo. De acordo com os mandatos da condição padrão, se a Rede Neural estiver no mínimo da função de perda, o gradiente é o vetor zero.
Como a função de perda é uma função não linear dos parâmetros, é impossível encontrar os algoritmos de treinamento fechados para o mínimo. No entanto, se considerarmos a busca no espaço de parâmetros que inclui uma série de etapas, a cada etapa, a perda será reduzida ajustando os parâmetros da Rede Neural.
Na otimização multidimensional, uma Rede Neural é treinada escolhendo um vetor aleatório de parâmetros e gerando uma sequência de parâmetros para garantir que a função de perda diminua a cada iteração do algoritmo. Essa variação de perda entre duas etapas subsequentes é conhecida como “decremento de perda”. O processo de decremento da perda continua até que o algoritmo de treinamento atinja ou satisfaça a condição especificada.
Aqui estão três exemplos de algoritmos de otimização multidimensional:
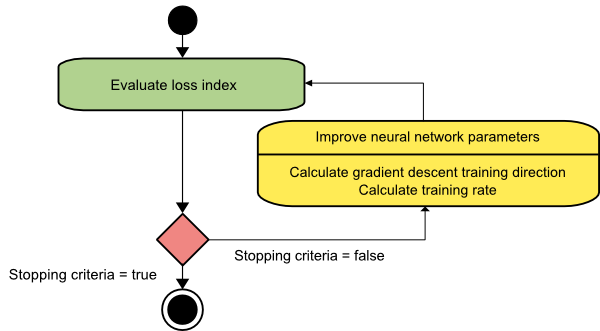
Gradiente descendente
O algoritmo de gradiente descendente é provavelmente o mais simples de todos os algoritmos de treinamento. Como ele se baseia nas informações fornecidas pelo vetor gradiente, é um método de primeira ordem. Neste método, tomaremos f[w(i)] = f(i) e ∇f[w(i)] = g(i) . O ponto de partida deste algoritmo de treinamento é w(0) que continua progredindo até que o critério especificado seja satisfeito – ele se move de w(i) para w(i+1) na direção de treinamento d(i) = −g(i) . Assim, o gradiente descendente itera da seguinte forma:
w(i+1) = w(i)−g(i)η(i),
Aqui, i = 0,1,…
O parâmetro η representa a taxa de treinamento. Você pode definir um valor fixo para η ou defini-lo como o valor encontrado pela otimização unidimensional ao longo da direção de treinamento em cada etapa. No entanto, é preferível definir o valor ideal para a taxa de treinamento alcançada pela minimização da linha em cada etapa.
Fonte
Esse algoritmo tem muitas limitações, pois requer inúmeras iterações para funções que possuem estruturas de vale longas e estreitas. Embora a função de perda diminua mais rapidamente na direção do gradiente descendente, ela nem sempre garante a convergência mais rápida.
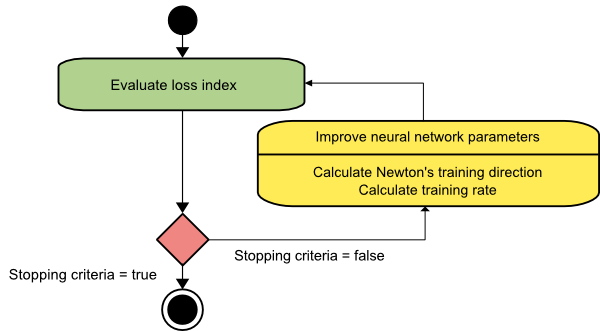
O método de Newton
Este é um algoritmo de segunda ordem, pois aproveita a matriz Hessiana. O método de Newton visa encontrar melhores direções de treinamento fazendo uso das segundas derivadas da função de perda. Aqui, denotaremos f[w(i)] = f(i), ∇f[w(i)]=g(i) , e Hf[w(i)] = H(i) . Agora, vamos considerar a aproximação quadrática de f em w(0) usando a expansão em série de Taylor, assim:
f = f(0)+g(0)⋅[w−w(0)] + 0,5⋅[w−w(0)]2⋅H(0)
Aqui, H(0) é a matriz hessiana de f calculada no ponto w(0) . Considerando g = 0 para o mínimo de f(w) , obtemos a seguinte equação:
g = g(0)+H(0)⋅(w−w(0))=0
Como resultado, podemos ver que a partir do vetor de parâmetros w(0), o método de Newton itera da seguinte forma:
w(i+1) = w(i)−H(i)−1⋅g(i)
Aqui, i = 0,1 ,… e o vetor H(i)−1⋅g(i) é referido como “Passo de Newton”. Você deve lembrar que a mudança de parâmetro pode se mover para um máximo em vez de ir na direção de um mínimo. Normalmente, isso acontece se a matriz Hessiana não for definida positiva, fazendo com que a avaliação da função seja reduzida a cada iteração. No entanto, para evitar esse problema, geralmente modificamos a equação do método da seguinte maneira:
w(i+1) = w(i)−(H(i)−1⋅g(i))η
Aqui, i = 0,1 ,….
Você pode definir a taxa de treinamento η para um valor fixo ou o valor obtido por meio da minimização da linha. Assim, o vetor d(i)=H(i)−1⋅g(i) torna-se a direção de treinamento para o método de Newton.
Fonte
A principal desvantagem do método de Newton é que a avaliação exata do Hessiano e seu inverso são cálculos bastante caros.
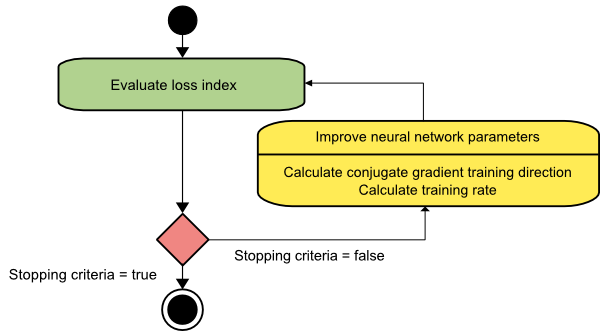
Gradiente conjugado
O método do gradiente conjugado fica entre o gradiente descendente e o método de Newton. Trata-se de um algoritmo intermediário – ao mesmo tempo em que visa acelerar o fator de convergência lenta do método gradiente descendente, também elimina a necessidade de informações referentes à avaliação, armazenamento e inversão da matriz Hessiana normalmente exigidas no método de Newton.
O algoritmo de treinamento de gradiente conjugado realiza a busca nas direções conjugadas que proporcionam uma convergência mais rápida do que as direções de descida do gradiente. Essas direções de treinamento são conjugadas de acordo com a matriz hessiana. Aqui, d denota o vetor de direção de treinamento. Se começarmos com um vetor de parâmetro inicial [w(0)] e um vetor de direção de treinamento inicial [d(0)=−g(0)] , o método do gradiente conjugado gera uma sequência de direções de treinamento representadas como:
d(i+1) = g(i+1)+d(i)⋅γ(i),
Aqui, i = 0,1 ,… e γ é o parâmetro conjugado. A direção de treinamento para todos os algoritmos de gradiente conjugado é periodicamente redefinida para o negativo do gradiente. Os parâmetros são melhorados, e a taxa de treinamento ( η ) é alcançada via minimização de linhas, conforme a expressão abaixo:
w(i+1) = w(i)+d(i)⋅η(i)
Aqui, i = 0,1 ,…
Fonte
Conclusão
Cada algoritmo vem com vantagens e desvantagens únicas. Esses são apenas alguns algoritmos usados para treinar Redes Neurais, e suas funções demonstram apenas a ponta do iceberg – à medida que os frameworks de Deep Learning avançam, as funcionalidades desses algoritmos também.
Se você estiver interessado em saber mais sobre rede neural, programas de aprendizado de máquina e IA , confira o Programa PG Executivo do IIIT-B e do upGrad em aprendizado de máquina e IA , projetado para profissionais que trabalham e oferece mais de 450 horas de treinamento rigoroso, mais de 30 estudos de caso e atribuições, status de ex-alunos do IIIT-B, mais de 5 projetos práticos práticos e assistência de trabalho com as principais empresas.
O que é uma rede neural?
As redes neurais são sistemas de múltiplas entradas e saída única, compostos de neurônios artificiais. A principal função de uma Rede Neural é converter entrada em saída significativa. Uma Rede Neural geralmente possui uma camada de entrada e saída, bem como uma ou mais camadas ocultas. Todos os neurônios em uma Rede Neural influenciam uns aos outros, portanto, todos estão conectados. A rede pode reconhecer e observar todas as facetas do conjunto de dados em questão, bem como as várias partes dos dados podem ou não estar relacionadas entre si. É assim que as Redes Neurais podem detectar padrões incrivelmente complicados em grandes quantidades de dados.
Qual é a diferença entre redes de feedback e feedforward?
Os sinais em um modelo feedforward só se movem de uma maneira, para a camada de saída. Com zero ou mais camadas ocultas, as redes feedforward têm uma camada de entrada e uma única camada de saída. O reconhecimento de padrões faz uso extensivo deles. As redes recorrentes ou interativas no modelo de feedback processam a série de entradas usando seu estado interno (memória). Os sinais podem se mover em ambos os sentidos pelos loops da rede (camadas ocultas). Eles são comumente utilizados em atividades que exigem uma sucessão de eventos em uma determinada ordem.
O que você entende por problema de aprendizagem?
O problema de aprendizagem é modelado como um problema de minimização do índice de perda (f). 'f' denota a função que avalia o desempenho de uma Rede Neural em um determinado conjunto de dados. O índice de perdas é composto por dois termos: um componente de erro e um termo de regularização. Enquanto o termo de erro analisa quão bem uma Rede Neural se ajusta a um conjunto de dados, o termo de regularização evita o overfitting limitando a complexidade efetiva da Rede Neural. As variáveis adaptativas da Rede Neural – pesos e vieses – determinam a função de perda (f(w)). Essas variáveis podem ser agrupadas em um único vetor de peso n-dimensional (w).