
Algoritmul de sortare rapidă explicat [cu exemplu]
Publicat: 2020-12-15Sortare rapidă se bazează pe conceptul de algoritm Divide and Conquer , care este și conceptul folosit în Merge Sort. Diferența este că, în sortarea rapidă, cea mai importantă sau semnificativă lucrare este făcută în timp ce partiționați (sau împărțiți) matricea în subbary, în timp ce în cazul sortării prin îmbinare, toate lucrările majore au loc în timpul îmbinării subbary-urilor. Pentru sortarea rapidă, pasul de combinare este nesemnificativ.
Sortare rapidă se mai numește și sortare cu schimb de partiții . Acest algoritm împarte matricea dată de numere în trei părți principale:
- Elemente mai mici decât elementul pivot
- Element pivot
- Elemente mai mari decât elementul pivot
Elementul pivot poate fi ales dintre numerele date în mai multe moduri diferite:
- Alegerea primului element
- Alegerea ultimului element (exemplu prezentat)
- Alegerea oricărui element aleatoriu
- Alegerea medianei
De exemplu: în tabloul {51, 36, 62, 13, 16, 7, 5, 24} , luăm 24 ca pivot (ultimul element). Deci, după prima trecere, lista va fi schimbată astfel.
{5 7 16 13 24 62 36 51}
Prin urmare, după prima trecere, matricea este sortată astfel încât toate elementele mai mici decât pivotul ales să fie pe partea stângă și toate elementele mai mari pe partea dreaptă. Pivotul se află în sfârșit în poziția în care ar trebui să fie în versiunea sortată a matricei. Acum subtabelele {5 7 16 13} și {62 36 51} sunt considerate ca două tablouri separate, și aceeași logică recursivă va fi aplicată asupra lor și vom continua să facem acest lucru până când matricea completă este sortată.

Citiți și: Sortare heap în structura datelor
Cuprins
Cum functioneazã?
Aceștia sunt pașii urmați în algoritmul de sortare rapidă:
- Alegem pivotul nostru ca ultimul element și începem să partiționăm (sau împărțim) matricea pentru prima dată.
- În acest algoritm de partiționare, matricea este împărțită în 2 subgrupuri astfel încât toate elementele mai mici decât pivotul vor fi pe partea stângă a pivotului și toate elementele mai mari decât pivotul vor fi pe partea dreaptă a acestuia.
- Și elementul pivot va fi în poziția finală sortată.
- Elementele din subbaryurile din stânga și din dreapta nu trebuie să fie sortate.
- Apoi alegem recursiv sub-tabele din stânga și din dreapta și efectuăm partiționarea pe fiecare dintre ele alegând un pivot în sub-tare și pașii se repetă pentru același lucru.
Mai jos este prezentat cum funcționează algoritmul în codul C++, folosind un exemplu de matrice.
void QuickSort (int a[], int low, int high)
{
dacă (mare < scăzut)
întoarcere;
int p= partition(a,low,high);
QuickSort(a,low,p-1);
QuickSort(a,p+1,high);
}
partiție int (int a[], int low, int high)
{
int pivot=a[high];
int i=scăzut;
for(int j=low; j<high; j++)
{
if(a[j]<=pivot)
{
swap(&a[j],&a[i]);
i++;
}
}
swap(&a[i],&a[high]);
returnează i;
}
int main()
{
int arr[]={6,1,5,2,4,3};
QuickSort(arr,0,5);

cout<<”Matricea sortată este: “;
for(int i=0; i<6; i++)
cout<<arr[i]<<” „;
returnează 0;
}
Mai jos este o reprezentare grafică a modului în care sortarea rapidă va sorta matricea dată.
Să presupunem că matricea inițială de intrare este:
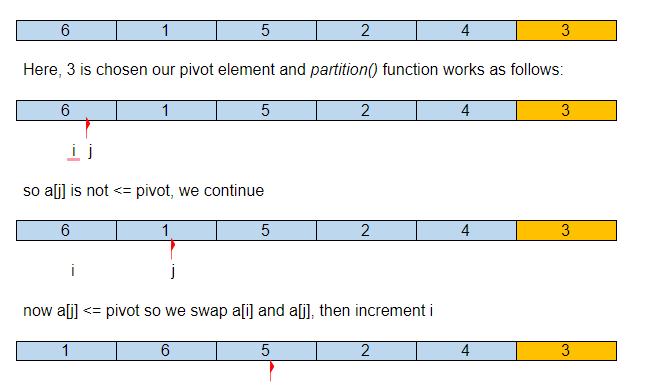
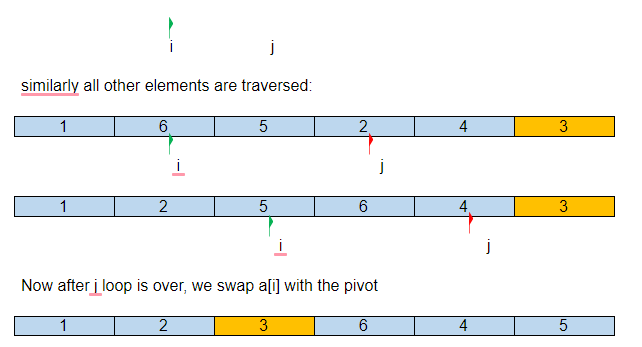
Deci, după prima noastră partiție, elementul pivot este la locul său corect în matricea sortată, cu toate elementele sale mai mici la stânga și mai mari la dreapta.
Acum QuickSort() va fi apelat recursiv pentru sub-tabele {1,2} și {6,4,5} și va continua până când matricea este sortată.
Trebuie citit: Tipuri de algoritmi AI pe care ar trebui să le cunoașteți
Analiza complexității
Ω Complexitatea timpului cel mai bun caz: Ω Θ Complexitatea timpului mediu: Θ O(n Complexitatea timpului cel mai rău caz: O(n Dacă partiționarea duce la subbaryuri aproape egale, atunci timpul de rulare este cel mai bun, cu complexitatea timpului ca O(n*log n).
Cel mai rău caz se întâmplă pentru matrice cu cazuri în care elementele sunt deja sortate, iar pivotul este ales ca ultimul element. Aici, partiționarea dă sub-cadramente dezechilibrate, în care toate elementele sunt deja mai mici decât pivotul și, prin urmare, pe partea stângă, și niciun element pe partea dreaptă.
O(n*log n) O(n*log n)
Concluzie
Quicksort este un algoritm bazat pe comparație și nu este stabil . O mică optimizare care poate fi făcută este să apelați mai întâi funcția recursivă QuickSort() pentru subbarra mai mică și apoi pentru subbarra mai mare.
În general, Quick Sort este o tehnică de sortare extrem de eficientă, care poate oferi performanțe mai bune decât Merge Sort în cazul matricelor mai mici.
Dacă doriți să învățați mai multe, consultați programul PG Diploma în învățare automată și AI a upGrad și IIIT-B.
Care sunt dezavantajele utilizării algoritmului de sortare rapidă?
În general, algoritmul de sortare rapidă este tehnica cea mai eficientă și utilizată pe scară largă pentru sortarea unei liste de orice dimensiune, deși are unele dezavantaje. Este o metodă fragilă, ceea ce presupune că dacă un defect minor în implementare nu este verificat, rezultatele vor avea de suferit. Implementarea este dificilă, mai ales dacă recursiunea nu este disponibilă. O mică limitare a algoritmului de sortare rapidă este că performanța sa în cel mai rău caz este comparabilă cu performanțele tipice ale bulei, inserției sau selectării.
Pentru ce se folosește algoritmul de sortare a găleților?
Algoritmul de sortare al găleților este o metodă de sortare care este utilizată pentru a pune diferite elemente în grupuri diferite. Este numit astfel deoarece diferitele subgrupuri sunt denumite găleți. Datorită distribuției uniforme a elementelor, este rapid asimptotic. Cu toate acestea, dacă avem o gamă uriașă, este ineficient, deoarece crește costul procesului total, făcându-l mai puțin accesibil.
Care dintre ele este mai bine de utilizat - algoritmul de sortare rapidă sau de sortare mergesort?
Pentru seturi de date mici, Quicksort este mai rapid decât alți algoritmi de sortare, cum ar fi Selection Sort, dar Mergesort are performanțe consistente, indiferent de dimensiunea datelor. Quicksort, pe de altă parte, este mai puțin eficient decât mergesort atunci când se ocupă cu matrice mai mari. Mergesort ocupă mai mult spațiu, dar quicksort ocupă foarte puțin. Quicksort, în special, are o localitate puternică în cache, ceea ce îl face mai rapid decât sortarea prin îmbinare în multe situații, cum ar fi într-un mediu de memorie virtuală. Ca rezultat, sortarea rapidă depășește algoritmul mergesort.